Nauczyli się ustawiać go do dalszej pracy. Przejdźmy teraz bezpośrednio do kompilacji algorytmów dla Robota za pomocą prostych poleceń.
Jeśli wolisz informacje w formie samouczków wideo, strona zawiera samouczek wideo
Każdy wykonawca musi mieć system dowodzenia ( NARTY — system dowodzenia egzekutora). Executor system poleceń- zestaw wszystkich poleceń, które wykonawca może wykonać. Jako przykład rozważ wytresowanego psa. Wie, jak wykonać niektóre polecenia - „Usiądź”, „Połóż się”, „Dalej” itp. To jest jej system poleceń.
Proste polecenia robota
Nasz Robot posiada również system dowodzenia. Dzisiaj przyjrzymy się prosty Polecenia robota . Łącznie jest ich 5:
- w górę
- w lewo
- prawo
- przemalować
Wynik wykonania tych poleceń wynika z ich nazwy:
- w górę— przesuń Robota o jedną komórkę w górę
- droga w dół— przesuń Robota o jedną komórkę w dół
- w lewo— przesuń Robota o jedną komórkę w lewo
- prawo— przesuń Robota o jedną komórkę w prawo
- przemalować— zamaluj bieżącą komórkę (komórkę, w której znajduje się Robot).
Te polecenia można pisać z klawiatury lub można użyć skrótów klawiszowych (po ich naciśnięciu polecenia zostaną wstawione automatycznie):
- w górę - Escape, Up (strzałka w górę)
- dół - Escape, Down (strzałka w dół)
- left - Escape, Left (strzałka w lewo)
- prawo - Escape, Prawo (strzałka w prawo)
- zamaluj - Escape, Space (spacja)
Pamiętaj, że musisz wybrać żądaną kombinację klawiszy skrótu nie w zwykły sposób! Jesteśmy przyzwyczajeni do jednoczesnego naciskania klawiszy, ale tutaj są one potrzebne naciśnij sekwencyjnie. Na przykład, aby wprowadzić polecenie w górę, musisz nacisnąć klawisz Escape, zwolnić je, a następnie nacisnąć strzałkę w górę. Trzeba o tym pamiętać.
Teraz jesteśmy gotowi do napisania pierwszego algorytmu dla Robota. Proponuję zacząć od prostego - narysuj kwadrat o boku 3 komórek. Iść!
Wprowadzamy Idola, to. Czy mogę zacząć pisać program? Oczywiście nie! My nie jesteśmy! Zróbmy to. Proponuję użyć tego:
Teraz wszystko gotowe. Zacznijmy pisać program. Dopóki ona tak wygląda

Usuń symbol „|” i nazwij nasz algorytm "Kwadrat"

Proponuję narysować kwadrat, poruszając się zgodnie z ruchem wskazówek zegara. Najpierw zamaluj bieżącą komórkę, wydając polecenie przemalować. Następnie robimy krok w prawo i ponownie malujemy celę. I jeszcze raz przejdź w prawo i zamaluj.

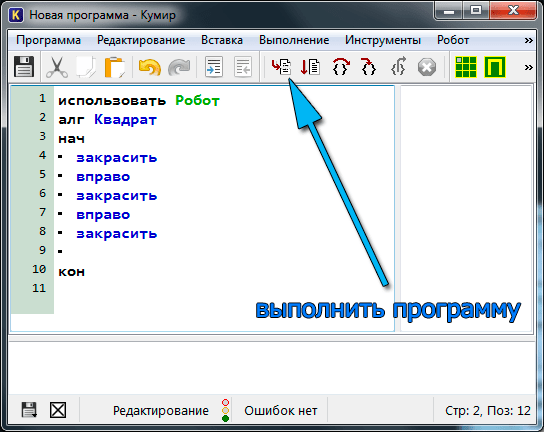
Spróbujmy uruchomić program i zobaczmy, co się stało. Naciśnij, aby uruchomić F9 lub przycisk na pasku narzędzi
W rezultacie powinniśmy zobaczyć coś takiego

Jeśli nie masz takiego okna Robota, to na pasku narzędzi kliknij " Pokaż okno robota” lub w menu Robot wybierz pozycję „ Pokaż okno robota”. Kontynuujemy dalej.
Teraz zejdziemy w dół i zamalujemy prawą stronę kwadratu:
droga w dół
przemalować
droga w dół
przemalować
Następnie przejdźmy w lewo, malując dolną granicę kwadratu
w lewo
przemalować
w lewo
przemalować
Została nam jedna niepomalowana komórka. Pomalujmy to
w górę
przemalować
Wszystko gotowe! W efekcie nasz program wygląda tak:
użyj robota
alg Kwadrat
wczesny
przemalować
prawo
przemalować
prawo
przemalować
droga w dół
przemalować
droga w dół
przemalować
Wykonawca robota ma system poleceń. Rozważać proste polecenia robota. Łącznie jest ich 5:
w górę- przesuń Robota o jedną komórkę w górę
droga w dół- przesuń Robota o jedną komórkę w dół
w lewo- przesuń Robota o jedną komórkę w lewo
prawo- przesuń Robota o jedną komórkę w prawo
przemalować
Ćwiczenie 1. Narysuj kwadrat o boku 3 komórek.
Uruchomienie Kumira
Usuń symbol „|” i nazwij nasz algorytm "Kwadrat" (obok słowa serwisowego) alg pisać Kwadrat)
przemalować
przemalować
przemalować
Uruchom program i zobacz, co się stanie. Naciśnij, aby uruchomić F9 lub przycisk na pasku narzędzi Uruchom program
Jeśli nie masz takiego okna Robota, to na pasku narzędzi kliknij " Pokaż okno robota” lub w menu Robot wybierz pozycję „ Pokaż okno robota”. Kontynuujemy dalej:
droga w dół
przemalować
droga w dół
przemalować
Następnie przejdźmy w lewo, malując dolną granicę kwadratu
w lewo
przemalować
w lewo
przemalować
Została nam jedna niepomalowana komórka. Pomalujmy to
w górę
przemalować
Wszystko gotowe! W efekcie nasz program wygląda tak:
użyj robota
Alg Kwadrat
przemalować
przemalować
przemalować
przemalować
przemalować
przemalować
przemalować
przemalować
Zadanie 2.Za pomocą proste polecenia robota, napisz program, który rysuje literę P, R, W, W, T, N.
Pętla warunkowa.
Wykonawca Robota ma kilka warunków: góra wolna dół wolna lewa wolna prawa wolna górna ściana dolna ściana
lewa ściana prawa ściana
Zadanie 3 .
remis pionowa linia od lewej do prawej granicy pola używam pętli z warunkiem. Początkowo Robot znajduje się w lewym górnym rogu.
Źródło nasz program Robot będzie wyglądał mniej więcej tak:
użyj robota
alg
wczesny
przemalować
nc, gdy prawo jest wolne
prawo
przemalować
kts
kon
W wyniku wykonania tego programu zobaczymy następujący obraz:
Zadanie 4.Napisz program, który wykona ramkę wokół pola roboczego Robota, niezależnie od jego wielkości. Oczywiście za pomocą pętli warunkowych. W rezultacie powinno to wyglądać tak:

Cały proces składa się z dwóch etapów: montażu i programowania. Zbierać dobry robot wymagana jest znajomość mechaniki. Aby zaprogramować robota do określonych czynności, musisz znać język, który zrozumie płyta główna lub blok programu. Szkolna wiedza z zakresu informatyki nie wystarczy.
Skąd wziąć materiał?
Najpierw musisz zdecydować, jak chcesz zmontować robota: z gotowych zestawów lub samodzielnie wybrać materiały. Zaletą zestawu jest to, że nie trzeba szukać części indywidualnie. Najczęściej z jednego zestawu można złożyć kilka urządzeń.
Struktura, która nie jest złożona z gotowego zestawu, nazywa się otwarty system. Ma też swoje zalety: Twój robot będzie indywidualistą, a Ty sam będziesz mógł ulepszać projekt. Ale na pewno spędzisz więcej czasu i wysiłku.
Z czego zrobiony jest robot?
Obudowa - metalowa lub plastikowa "ciało", do którego przymocowane są pozostałe części. Każdy robot posiada źródło energii - baterie lub akumulator. W zależności od tego, jakie zadanie wykona robot, dobierane są czujniki: mogą wykrywać kolor i światło oraz reagować na dotyk.
Aby robot się poruszał, potrzebujesz silników. "Głowa" całego mechanizmu - płyty głównej lub bloku programu. Za ich pomocą robot łączy się z komputerem i otrzymuje zestaw zadań.
Jak zmusić go do zrobienia czegoś?
Aby robot wykonał jakąś akcję, musisz stworzyć program komputerowy. Złożoność tego kroku zależy od montażu. Jeśli robot jest złożony z zestawu Lego Mindstorms lub mBot, nawet dzieci mogą obsługiwać ich oprogramowanie.
Jeśli sam budujesz robota, musisz nauczyć się podstaw programowania i języka, w którym zamierzasz napisać program, np. C++.
Dlaczego robot nie może wykonać programu?
Dostając się w nowe miejsce, może zbłądzić i niepoprawnie wykonać program. Aby robot wykonał wszystko poprawnie, konieczne jest wyregulowanie czujników. Na przykład zbyt jasne oświetlenie może zakłócać prawidłowe rozpoznawanie kolorów. W zależności od powierzchni, po której porusza się robot, moc silników jest regulowana.
Czy mogę nauczyć się składać i programować w szkole?
Pomimo tego, że robotyka nie jest uwzględniona w szkolnym programie nauczania, nauczyciele fizyki i informatyki mogą uczyć dziecko składania i programowania. W Biełgorodzie niektóre szkoły mają kręgi, w których produkują roboty.
„Po lekcjach z nauczycielami fizyki i informatyki uczymy się programować. Wiemy już, jak pracować w LegoMindstorms i Robolab ( oprogramowanie dla robotów - ok. wyd.). Czasami uczymy się również, jak tworzyć rysunki 3D części” – mówili studenci Belgorod Engineering Youth Boarding Lyceum i uczestnicy RoboFest-2018 Anton Pershin oraz Dmitrij Czernow.

Gdzie poza szkołą można zostać robotykiem?
Szkoła inżynierska w BelSU ma klasę, w której uczą, jak składać i programować roboty. W 2017 roku w Biełgorodzie otwarto Quantorium, w którym dzieci w wieku szkolnym uczą się robotyki od 9 roku życia.
Aby zostać prawdziwym robotykiem, możesz wstąpić na Wydział Robotyki. Takich ludzi jeszcze nie ma w Biełgorodzie, ale w BSTU im. Szuchow ma dział cybernetyki technicznej. Jej uczniowie zdobywają nagrody na ogólnorosyjskich zawodach z robotyki.
Czy możesz uczyć się samodzielnie?
TAk. W Internecie jest wiele zasobów, w których można dowiedzieć się, co zbudować i jak zaprogramować robota.
Czy robot się przyda?
Może być przystosowany do codziennych zadań i pełnić funkcję pomocnika w domu. W Internecie jest wiele przykładów na to, jak wynalazcy domów tworzą roboty do pieczenia naleśników lub sprzątania mieszkania.
Jak potwierdzić swój sukces w tworzeniu robotów?
Weź udział w konkursach takich jak RoboFest. Nominacje są różne w zależności od wieku i kierunku. Zasadniczo każdy typ robota ma tor, na którym wykonuje zadania: złap sześcian lub narysuj linię. Istnieją również systemy statyczne, w których sędziowie oceniają prezentację projektu i działanie mechanizmów.
Z reguły uczestnicy przychodzą na zawody z montowane przez roboty a w ramach przygotowań poświęcają czas tylko na kalibrację czujników i dostosowanie programu.
Redaktorzy są wdzięczni za pomoc w tworzeniu materiału uczestników RoboFest-2018 Dmitrij Agafonow, Dmitrij Czernow, Anton Pershin oraz Danila Migrina.
Natalia Małyihina
Robot sterujący Executor w systemie KUMIRRobot istnieje w określonym środowisku (prostokątne pole w szachownicę). Ściany mogą znajdować się pomiędzy niektórymi komórkami pola. Niektóre komórki mogą być zacienione (ryc. 3.11).
Robot zajmuje dokładnie jedną komórkę pola.
Po komendach w górę, w dół, w lewo i w prawo Robot przechodzi do następnej komórki w określonym kierunku. Jeśli po drodze jest ściana, to następuje awaria - wyświetlany jest komunikat o niemożności wykonania kolejnego polecenia.
Na polecenie zamalowania Robot zamalowuje komórkę, w której stoi. Jeśli komórka została już zamalowana, zostanie zamalowana ponownie, chociaż nie nastąpią żadne widoczne zmiany.
Robot może wykonywać tylko poprawnie napisane polecenia. Jeśli napiszesz zamiast komendy down, Robot nie zrozumie tego wpisu i natychmiast zgłosi błąd.
O  błędy: 1 składniowe; 2. logiczne
błędy: 1 składniowe; 2. logiczne
Opisy scen są przechowywane w pliki tekstowe format specjalny (format .fil).
Aktualny- środowisko, w którym znajduje się Robot ten moment(w tym informacje o pozycji Robota).
Dom- środowisko, w którym Robot jest wymuszany na początku wykonywania programu z wykorzystaniem Robota.
Procedura operacyjna:
Zapytać się środowisko początkowe zgodnie z zadaniem:
2. Określ Wykonawcę:
Wstaw menu →Użyj robota
3. Napisz algorytm rozwiązania problemu.
4. Uruchom algorytm (Menu Uruchom → Uruchom ciągły / F9)
System poleceń robota wykonawczego w systemie KUMIR
|
Zespół |
Akcja |
|
w górę |
Robot porusza się w górę o 1 komórkę |
|
droga w dół |
Robot przesuwa się w dół o 1 komórkę |
|
w lewo |
Robot przesuwa się o 1 komórkę w lewo |
|
prawo |
Robot przesuwa się o 1 komórkę w prawo |
|
przemalować |
Robot maluje komórkę, w której się znajduje |
|
prawo za darmo |
Robot sprawdza wykonanie odpowiedniego prosty semestry |
|
pozostawiony wolny |
↓ |
|
góra luźna |
↓ |
|
dół luźny |
↓ |
|
komórka jest zacieniona |
↓ |
|
klatka czysta |
↓ |
Algorytmy cykliczne
 Cykl organizacja powtarzających się czynności aż do spełnienia określonego warunku .
Cykl organizacja powtarzających się czynności aż do spełnienia określonego warunku .
Pętla ciała - zestaw powtarzalnych czynności.
Stan - wyrażenie logiczne (proste lub złożone (złożone))
Rodzaje cykli:
1.Pętla „Powtórz n razy” 2. Pętla „Do widzenia”
nc n razy nts pa
. . Pętla ciała. . Pętla ciała
kts kts
Przykład: nts pa prawo za darmo
Widok ogólny cyklu „Powtórz n razy:
REPEAT n RAZY
KONIEC
kts
Ogólny widok pętli while:
KIEDY ZROBIĆ
KONIEC
Warunki złożone utworzony z jednego lub więcej proste terminy i słowa służbowe I LUB NIE.
Stan złożony A i B(gdzie A, B są prostymi warunkami) jest spełniony, gdy każdy z dwóch prostych warunków w nim zawartych jest spełniony.
Niech A - bezpłatnie na górze W - wolny po prawej to warunek złożony A i B- za darmo na górze ORAZ za darmo po prawej.
Stan złożony A LUB B jest spełniony, gdy spełniony jest przynajmniej jeden z dwóch zawartych w nim prostych warunków: top za darmo LUB prawo za darmo
Stan złożony ANI- spełniony, gdy warunek A nie jest spełniony.
Przykład: Niech A będzie zacienioną komórką (warunek prosty).
P  Sprawdzanie stanu mieszanki NIE A:
Sprawdzanie stanu mieszanki NIE A:
a) A – gotowe, NOT A (NIE zacieniowane) – nie zrobione.
b) A - nie zrobione, NIE A (NIE zacieniowane) - gotowe.
Polecenie oddziału
Rozgałęzienie - forma organizacji działań, w której w zależności od spełnienia lub niespełnienia określonego warunku wykonywana jest jedna lub inna sekwencja działań.
Widok ogólny polecenia JEŻELI:
JEŚLI NASTĘPNIE INACZEJ
KONIEC
W języku KUMIR:
Rozgałęzienia pełne: Rozgałęzienia częściowe:
jeśli następnie
jeśli następnie
Inaczej
wszystko wszystko

Algorytm pomocniczy- algorytm, który rozwiązuje pewien podproblem głównego problemu.
W systemie KUMIR algorytmy pomocnicze są zapisywane na końcu programu głównego (po oficjalne słowo kon) są wywoływane do wykonania w programie głównym według nazwy.
W  ankiety i zadania
ankiety i zadania
1. Podaj wszystkie algorytmy trzech poleceń, które przeniosą robota z jego pierwotnej pozycji do komórki B.
Czy istnieje algorytm do tego zadania, podczas którego Robot wykonuje:
a) dwa kroki b) cztery kroki; c) pięć kroków; d) siedem kroków?
Petya stworzył algorytm, który przenosi Robota z komórki A do komórki B z zamalowanymi niektórymi komórkami. Co powinien zrobić Kola z tym algorytmem, aby uzyskać algorytm, który przenosi Robota z punktu B do punktu A i wypełnia te same komórki?


7. Dwa są znane algorytmy pomocnicze Robot
Narysuj, co się stanie, gdy Robot wykona następujące podstawowe algorytmy:
|
a) nc 5 razy wzór_1 prawo; prawo; |
b) nc 7 razy wzór_2 prawo; prawo |
|
w) prawo; prawo; prawo w górę; w górę prawo; prawo; prawo droga w dół; droga w dół |
G) prawo; prawo prawo; prawo |
8. Utwórz algorytmy, w ramach których Robot zamaluje wskazane komórki:
 9
9 . Wiadomo, że gdzieś na prawo od Robota znajduje się ściana. Wymyśl algorytm, pod kontrolą którego Robot zamaluje kilka komórek aż do ściany i powróci do swojej pierwotnej pozycji.
. Wiadomo, że gdzieś na prawo od Robota znajduje się ściana. Wymyśl algorytm, pod kontrolą którego Robot zamaluje kilka komórek aż do ściany i powróci do swojej pierwotnej pozycji. 10. Wiadomo, że gdzieś na prawo od Robota znajduje się zacieniona komórka.

Z  pozostawić algorytm, pod kontrolą którego Robot pomaluje liczbę komórek aż do zacieniowanej komórki i wróci do swojej pierwotnej pozycji.
pozostawić algorytm, pod kontrolą którego Robot pomaluje liczbę komórek aż do zacieniowanej komórki i wróci do swojej pierwotnej pozycji.
11. Wiadomo, że Robot znajduje się w pobliżu lewego wejścia do poziomego korytarza.
1 2. Wiadomo, że Robot znajduje się gdzieś w poziomym korytarzu. Żadna z komórek korytarza nie jest zamalowana.
2. Wiadomo, że Robot znajduje się gdzieś w poziomym korytarzu. Żadna z komórek korytarza nie jest zamalowana.
Wymyśl algorytm, pod kontrolą którego Robot zamaluje wszystkie komórki tego korytarza i powróci do swojej pierwotnej pozycji.
13. W rzędzie dziesięciu komórek na prawo od Robota niektóre komórki są zacienione.
Z  pozostaw algorytm, który maluje komórki:
pozostaw algorytm, który maluje komórki:
a) poniżej każdej zacienionej komórki;
b) powyżej i poniżej każdej zacienionej komórki.
14. Co można powiedzieć o poprawności poniższego fragmentu algorytmu?
nts pa komórka jest zacieniona
JEŚLI prawo za darmo NASTĘPNIE
prawo; przemalować
do  c
c
15. Napisz program, za pomocą którego Robot może dostać się do komórki B we wszystkich trzech labiryntach.
1
 6. Napisz program, dzięki któremu Robot będzie mógł przejść korytarzem od lewego dolnego rogu pola do prawego górnego. Korytarz ma szerokość jednej komórki i rozciąga się w kierunku od lewej do dołu do prawej do góry. Przykład możliwego korytarza pokazano na rysunku.
6. Napisz program, dzięki któremu Robot będzie mógł przejść korytarzem od lewego dolnego rogu pola do prawego górnego. Korytarz ma szerokość jednej komórki i rozciąga się w kierunku od lewej do dołu do prawej do góry. Przykład możliwego korytarza pokazano na rysunku. W 
 adachi GIA
adachi GIA
Korytarz1. Robot jest gdzieś w pionowym korytarzu. Żadna z komórek korytarza nie jest zamalowana. Stwórz algorytm, zgodnie z którym Robot zamaluje wszystkie komórki tego korytarza i powróci do swojej pierwotnej pozycji.
Do
NiezbędnyDany
korytarz2. Robot znajduje się w górnej celi wąskiego pionowego korytarza. Szerokość korytarza to jedna komórka, długość korytarza może być dowolna.
Napisz algorytm dla Robota, który wypełni wszystkie komórki w korytarzu i przywróci Robotowi jego pierwotną pozycję. Na przykład na powyższym obrazku Robot powinien zamalować następujące komórki (patrz rysunek):
Na bezkresnym polu jest długa pozioma ściana. Długość muru nie jest znana. Robot znajduje się w jednej z klatek bezpośrednio nad ścianą. Nieznane jest również początkowe położenie Robota. Jedna z możliwych pozycji:


Niezbędny
Dany
Napisz algorytm dla Robota, który maluje wszystkie komórki powyżej i przylegające do ściany, niezależnie od wielkości ściany i początkowej pozycji Robota. Np. dla danego rysunku Robot musi zamalować następujące komórki:
Ostateczna pozycja Robota może być dowolna. Podczas wykonywania algorytmu Robot nie powinien zostać zniszczony.



Na nieskończonym polu jest długa pionowa ściana. Długość muru nie jest znana. Robot znajduje się w jednej z klatek znajdujących się bezpośrednio na prawo od ściany. Nieznane jest również początkowe położenie robota. Jedna z możliwych pozycji robota jest pokazana na rysunku (robot jest oznaczony literą „P”): Napisz algorytm pracy, który maluje wszystkie komórki przylegające do ściany: po lewej stronie, zaczynając od góry niepomalowane i przez jeden; po prawej, zaczynając od dołu zacienionego i przechodząc przez jeden. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład dla powyższego rysunku robot musi wypełnić następujące komórki (patrz rysunek): Ostateczna lokalizacja robota może być dowolna. Algorytm musi rozwiązać problem dla dowolnej wielkości ściany i dowolnej prawidłowej pozycji początkowej robota. Podczas wykonywania algorytmu Robot nie powinien się zawalić.

Napisz algorytm dla Robota, który maluje wszystkie komórki znajdujące się na lewo od pionowej ściany i powyżej poziomej ściany i przylegające do nich. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład na powyższym obrazku Robot musi zamalować następujące komórki (patrz rysunek).

H  napisz algorytm dla Robota, który maluje komórki przylegające do ściany, od góry i od dołu, zaczynając od lewej i przechodząc przez jedną. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład dla podanej figury a) Robot musi zamalować kolejne komórki (patrz rys. b).
napisz algorytm dla Robota, który maluje komórki przylegające do ściany, od góry i od dołu, zaczynając od lewej i przechodząc przez jedną. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład dla podanej figury a) Robot musi zamalować kolejne komórki (patrz rys. b).
Ostateczna pozycja Robota może być dowolna. Algorytm musi rozwiązać problem dla dowolnej wielkości ściany i dowolnej prawidłowej pozycji początkowej Robota.
|
R | |||||
Na nieskończonym polu jest długa pionowa ściana. Długość muru nie jest znana. Robot znajduje się w jednej z klatek znajdujących się bezpośrednio na lewo od ściany. Nieznana jest również początkowa pozycja robota. Jedna z możliwych pozycji robota jest pokazana na rysunku (robot jest oznaczony literą „P”):
wszystko po lewej;
po prawej, zaczynając od góry niepomalowane i przez jedną.
B  1102_GIA2011
1102_GIA2011
Na nieskończonym polu są dwie poziome ściany. Długość murów nie jest znana. Odległość między ścianami nie jest znana. Robot znajduje się nad dolną ścianą w klatce znajdującej się przy jej lewej krawędzi. Napisz algorytm dla Robota, który maluje wszystkie komórki znajdujące się nad dolną ścianą i pod górną ścianą i przylegające do nich. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład dla powyższego rysunku robot musi wypełnić następujące komórki (patrz rysunek):
Ostateczna lokalizacja robota może być dowolna. Algorytm musi rozwiązać problem dla dowolnej wielkości pola i dowolnego dopuszczalnego położenia ścian wewnątrz pola prostokątnego. Podczas wykonywania algorytmu Robot nie powinien się zawalić.
W  1103_GIA_2011
1103_GIA_2011
Na nieskończonym polu jest pozioma ściana. Długość muru nie jest znana. Z prawego końca ściany rozciąga się w dół pionowa ściana, również o nieznanej długości. Robot znajduje się nad poziomą ścianą w klatce znajdującej się przy jej lewej krawędzi. Rysunek przedstawia jeden z możliwe sposoby położenie ścian i Robota (Robot jest oznaczony literą „P”).
Napisz algorytm dla Robota, który maluje wszystkie komórki znajdujące się nad ścianą poziomą i na prawo od ściany pionowej i przylegające do nich. Robot musi zamalować tylko te komórki, które spełniają ten warunek. Na przykład na powyższym obrazku Robot musi zamalować następujące komórki (patrz rysunek).
Performer Robot istnieje w polu prostokątnym, podzielonym na komórki, pomiędzy którymi mogą znajdować się ściany i mieści się w całości w jednej komórce. Robot może poruszać się po polu, malować komórki, mierzyć temperaturę i promieniowanie. Robot nie może przechodzić przez ściany, ale może sprawdzić, czy obok niego znajduje się ściana.
System dowodzenia wykonawcy „Robota” obejmuje:
- 5 poleceń wywołujących akcje robota (lewo, prawo, góra, dół, malowanie)
- 10 poleceń sprawdzających stan:
- 8 poleceń, takich jak [lewo/prawo/dół/góra] [ściana/wolne]
- 2 polecenia, takie jak klatka [zacieniowana/czysta]
- 2 komendy pomiarowe (temperatura, promieniowanie)
komendy-działania
Sprawdź polecenia
| Zespół | Opis |
| log pozostawiony wolny | Zwraca tak, jeśli robot może poruszać się w lewo, w przeciwnym razie nie. |
| logowanie po prawej jest bezpłatne | Zwraca tak, jeśli robot może poruszać się w prawo, w przeciwnym razie nie. |
| log top za darmo | Zwraca tak, jeśli robot może poruszać się w górę, w przeciwnym razie nie. |
| zaloguj się poniżej swobodnie | Zwraca tak, jeśli robot może spaść, w przeciwnym razie nie. |
| kłoda lewa ściana | Zwraca tak, jeśli na lewo od robota znajduje się ściana, w przeciwnym razie nie. |
| kłoda prawa ściana | Zwraca tak, jeśli po prawej stronie robota znajduje się ściana, w przeciwnym razie nie. |
| górna ściana z bali | Zwraca tak, jeśli nad robotem znajduje się ściana, w przeciwnym razie nie. |
| dolna ściana z bali | Zwraca tak, jeśli pod robotem znajduje się ściana, w przeciwnym razie nie. |
| komórka dziennika jest zacieniona | Zwraca tak, jeśli komórka jest wypełniona, i nie, jeśli komórka nie jest wypełniona. |
| czyszczenie komórki dziennika | Zwraca no, jeśli komórka jest wypełniona, i tak, jeśli komórka nie jest wypełniona. |
Polecenia pomiarowe
Niech będzie wymagane przeniesienie z celi na lewo od ściany do celi na prawo od ściany:
Algorytm może wyglądać tak:
użyj robota
alg przykład 1
wczesny
. droga w dół
. prawo
. w górę
kon
Jeśli spróbujesz przeprowadzić Robota przez ścianę, nastąpi awaria. Robot zderzy się ze ścianą i nie będzie mógł dalej wykonywać poleceń.
Napiszmy algorytm dla robota, który przejdzie labirynt z punktu A do B:
użyj robota
alg od A do B
wczesny
. prawo
. w górę ; w górę ; prawo ; droga w dół ; droga w dół ; prawo
. w górę ; w górę ; prawo ; droga w dół ; droga w dół ; prawo
kon
Polecenia przekazania każdej sekcji można zgrupować w jednej linii - skraca to zapis algorytmu i czyni go bardziej zrozumiałym. Aby pisać polecenia w jednym wierszu, należy je oddzielić średnikiem.